Рассылка закрыта
При закрытии подписчики были переданы в рассылку "Очевидное-Невероятное" на которую и рекомендуем вам подписаться.
Вы можете найти рассылки сходной тематики в Каталоге рассылок.
Технические фантазии в реальном воплощении # 45
Код tech.tft
Плавательные средства.
Выпуск No 45.
Автор и ведущий Cesiy
Самоходная динамическая лодка без весел.
Автономные устройства движения
с участием человека и приводных механизмов.
Динамика секторного диска и других профилей
в жидкой среде.
1. Введение.
Вращательные движения в природе не применяются. Полет в воздухе производится циклическим действием поступательно движущихся органов. По земле и по воде - тем же способом. В воде - более оригинально, экономно, можно даже сказать, что "разумно", волнообразно, но более сложно (для попытки практического исполнения в механике).
Не "применяются" ни суда на воздушной подушке, ни неподвижные подводные и воздушные крылья, ни винты и вертолеты, и так называемые самолеты, которые "успешно" придумала человеческая ищущая мысль.
Человек не смотрел вокруг, не до этого было. И не мог понять заранее, почему так происходит (вокруг). Почему принят единый универсальный принцип механизма движения, который не описывается ни в каких учебниках.
Кстати, до сих пор не понят общий принятый универсальный принцип механики построения организмов и биологический принцип жизни. Три кита: строение, движение, жизнь. Присоединяется ещё к этому вся динамика действующих и воспринимающих сил, различных возможностей и максимальная экономичность.
Чтобы летать (приоритет птиц - построенных по особому природному принципу - для воздуха) мы применяем самое простое - винт и крылья, однако, теряем в экономичности, в самом главном факторе жизни. В природе эта госпожа на первом месте - и, как показывает мировой опыт, совсем недаром. Быстрее летать - терять ещё больше.
Чтобы плыть (приоритет рыб - построенных по специальной природной конструкции - для воды) мы применяем закон Архимеда и лодочный принцип движения по поверхности, который отброшен из-за неэкономичности миллионы лет назад - об этом забыли, может быть, не знали. На разделе двух сред нельзя по определенным условиям производить погружение в обе среды. Примеры этому рыбы, птицы, жуки, сам человек. Потому что произойдет так, что в этом случае в одной из сред режим будет экономичней, чем в другой, а это неприемлемо.
Вот и стремяться уйти от этого, строят суда на подводных крыльях или на воздушной подушке, углубляясь в тупик ещё больше. Потому что при этом забывают, что на разделе сред нужны механизмы шагающие - они самые-самые, а в самих средах (быть или не быть?) природой определен (и недаром определен!) циклический принцип получения движения в условиях сил тяготения, как самый экономичный. И т.д.
Зачем такое введение?
2.
Даже если мы исключим все недостатки такого устройства как лодка, сделав все, как говорится, ОК! то есть поместив в воду пловца, или самого себя, как плавательного организма (на самом деле это не так!), и начнем движение - получится ещё хуже. Получим ноль экономичности и самую низкую скорость. Потому что не приспособлены, не отработаны для плавания, а тем более сразу в двух средах. Можно сколько угодно проводить соревнования пловцов, и каждый раз, и из года в год показатели будут улучшаться.
Почему? Потому что открыта дорога улучшений - это неприспособленность организма человека как для плавания, так и для движения в двух средах сразу. Улучшения можно получать бесконечно (в течение миллиона лет!). Очень хороший вид спорта!
3.
Также, как со старыми действиями веслами или ластами.
Начнется улучшение не пловца и его "искусства" плавать, не вида лодки, а их механизмов движения (не подумайте здесь об известном и плохом - о применении в воде винтов). Механизмы движения - самые лучшие механизмы движения - в природе на первом месте. Их роль очень высокая. Посмотрите, например, сами на себя.
Подготовка видов и принципов устройств для движения и устройств, помогающих движению, началась в выпусках tech.tft уже давно. Нужно ознакомиться с несколькими предыдущими - в них все эти устройства уже показаны (но были применены для других целей).
К ним, в частности, относятся секторный диск, механизм гусеничной тележки и схемы в выпусках о редукторах. Нужно иметь в виду те действия перечисленных устройств, которые были направлены на поступательное движение их органов и реактивно к достижению движения механизма, как объекта движения.
4.
На рисунке показана лодка, без весел, но с механизмом, взятым из разряда известных - гусеница, половина которой опущена в воду. Вид лодки с гусеницей сбоку представлен на рисунке, обозначенном как "Boat-a".
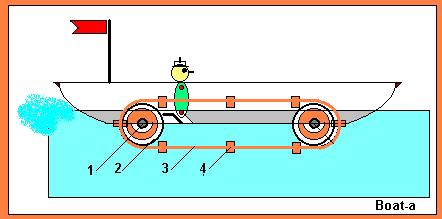
На этом рисунке обозначено:
1
- вал, 2 - ступица, 3 - гусеница или цепь, 4 - секторный диск. Всё остальное
- это сама лодка на воде и "капитан" в ней, плюс обязательная принадлежность
- флаг.
Вероятно, очень понятно,
что весел нет, а движение лодки вперед (или назад) осуществляется с помощью
действия гусеницы с укрепленными на ней секторными дисками. Ступица 2 -
это в самом первом приближении велосипедная "звездочка" на валу 1.
Вал проходит внутри и частично
снаружи корпуса лодки, "трюм" защищен от попадания воды сальниками. Кроме
того, он имеет педали и обгонную велосипедную втулку, дающую возможность
действовать на педали в фазе обгона. Педалей две - под две ноги "капитана",
он олицетворяет собой все функции: от матроса до капитана, от приводного
механизма до навигационного прибора.
На педали можно действовать
как обеими ногами сразу, так и поочередно. Их возврат к ноге производится
пружиной.
Как видно, весь механизм
состоит только из указанных частей - это два полых вала, на один из которых
устанавливаются педали, четыре ступицы, одеваемые на валы снаружи и две
гусеницы с укрепленными на них секторными дисками. Вместо секторных дисков
на гусеницы можно "повесить" что угодно - всё равно движение лодки будет
осуществлено (не высовывая руки за борт). Без этих "навесных" устройств
- лодка как лодка, с ними - это вид бесшумного удобного катера.
Все эти навесные
устройства могут быть, например, от велосипеда (гусеницу лучше сделать
из зубчатого или клинового ремня). Остальные элементы велосипеда не нужны,
кроме руля (как его использовать? Как обычно - в данную тему это
не входит).
Таким образом, вес
и габарит элементов будет меньше веса и габарита велосипеда (рама выбрасывается),
они могут быть уложены в специальный рюкзак и доставляться в нём к лодке,
если есть желание пройти по воде быстрее, легче, удобнее и дальше. Велосипедная
рама на воде и в лодке роли не играет. Если такого желания нет, действует
старинная инерция - берите весла в ту же лодку и гребите что есть сил.
5.
Если нет желания конструировать, чтобы подсоединить к валу электропривод (хотя это не похоже на сложное конструирование), не нужно этим заниматься. Возьмите редуктор электропривода в руки (тот, который был показан ранее и содержал пластины на эксцентриковых валах), уберите с него выходной вал и установите движущиеся пластины прямо на верхнюю часть гусеницы лодки. Этого будет достаточно, чтобы при работе электродвигателя движущиеся пластины "тянули" гусеницу - никакого редуктора не нужно. В них, в "эксцентриковых" пластинах, установленных на эксцентриках заключено всё: и шаговый ход, и редуктор, и выходная часть электропривода, и удобство подсоединения, и другое, почти всё то, что было описано в той же функции при рассмотрении гусеничной тележки. На всякий случай, в виде напоминания посмотрите ещё раз вид эксцентрикового редуктора (Boat-c).

Другая схема "редукторной функции" (для воды) будет показана здесь ниже.
Будет показано и
некоторое другое. То, что также было применено ранее для гусеничной тележки
(когда она освобождалась от гусениц и катков), чтобы имела возможность
движения и ходовую часть в виде движущихся плоскостей эксцентриковых пластин.
Только здесь "эти вещи" будут опущены в воду (Boat-d).
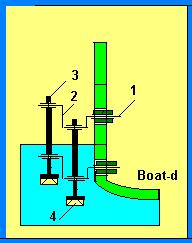
"Водный" вариант редуктора
имеет следующие обозначения: 1 - эксцентриковый вал, 2 - двойной эксцентрик,
3 - эксцентриковая платина, 4 - секторный диск или другой навесной элемент,
например, крыльевой профиль.
Нужно иметь в виду, что
навесные элементы на эксцентриковых пластинах могут (в "водном варианте)
устанавливаться в любом месте и любым образом относительно поверхности
эксцентриковых пластин. Получился новый вид механизма для движения (и,
вероятно, обеспечения дополнительной плавучести) в водной среде.
Здесь усматривается
и более фантастический вариант. Если элементы 4 выполнить в виде понтонов
- длина эксцентриковых пластин вдоль продольной оси лодки любая, - произойдет
взвешивание судна на понтонах. При их движении вместе с пластинами (траектория
движения равна окружности с диаметром 2) судно получит скользящее
движение по поверхности воды.
Ещё более фантастический
вариант состоит в том, что судно, подойдя к берегу, выйдет на сушу и пойдет
по ней дальше - независимо от вида поверхности: песок, трава, болото
или другое водное пространство.
Таким образом, может получиться
универсальный транспорт, движущийся по любой поверхности.
Дальнейшая фантастика
- это установка вместо двух простых эксцентриковых пластин двух плоскостей
крыльев. При вращении эксцентриков
и движении крыльев по траектории окружности возникнет подъемная сила!
Здесь дополнительно нужно
иметь в виду, что несмотря на фактор большой площади крыльев и их массу
момент инерции масс, приведенный к оси 1 может оказаться незначительным,
поскольку величина диаметра 2 мала.
При достижении соответствующей
скорости вращения вала 1 подъемная сила может превысить вес объекта. Имеет
значение установка угла атаки.
6.
Во-вторых, у парохода колесо было (и должно было быть) круглое. При этом оно по-настоящему тянуло своими деревянными лопастями только тогда, когда они занимали нижнюю точку, и было это с КПД ниже паровозного. В лодке этот "эффект" отсутствует. Гусеница тянет по всей своей длине, причем элементы "тяги" могут заменяться как на силовые, так и на быстроходные. Получается, что колесо больше бурлит, чем тянет, особенно, если увеличить скорость его вращения. И т.д.
Нужно ещё учесть и пароходный механизм привода к колесу, его действие, КПД, экономичность, вес. Как говорится, "Америка России подарила пароход - огромные колеса и очень тихий ход", что все знают. Можно ещё многое добавить.
7.
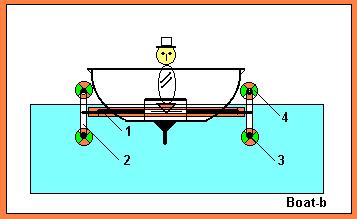
Здесь вновь не видно ничего нового, лодка и лодка с боковыми элементами, опущенными наполовину в воду. Что это за элементы, было показано чуть выше. Отличие этой лодки от гусеничной тележки в том, что (хочешь - не хочешь) корпус плавает, а боковые элементы тянут. Можно, конечно, опираться и плыть на них, с КПД 0,1%, если увеличить скорость.
8.
Вместо секторных дисков на гусеницу можно поставить крыльевые профили, почти как на судах с подводными крыльями. Правда, там они прикреплены к корпусу и неподвижны. Здесь, может быть, будет другой эффект. Нужны натурные испытания. Во всяком случае, может быть достаточно интересное исследование: движущиеся подводные крылья (чего не было ни в водном, ни в воздушном транспорте).
Их движение в воде идет в обратную сторону, а в воздухе - по направлению хода судна . Что-то в этом есть!
На первый взгляд не будет того "рычания", которое производит катер с подводными крыльями на всех режимах, не зря называемый "Ракетой". Во-вторых, выход на крылья даст глиссирование их по поверхности, а не движение в воде - можно будет уйти от участия в движении в двух средах. В третьих, движение на крыльях, движущихся назад, - это, возможно, новый вид динамической плавучести, где как угол атаки, так и лобовое сопротивление будут играть положительную роль. Заметьте, что никакой колесный пароход об этом и не мечтал. Посмотрите на рисунок, нетрудно представить его таким, когда элементы позиции 3 скользят по поверхности.
Может наступает "эра" самопроизвольной автоматизации? Примерно так, как это показано в выпуске под названием "Сезон парашютирования", когда в зависимости от скорости полета и других факторов на крыле устанавливался необходимый угол атаки. В этом случае есть и такая возможность. И т.д.
И другое, основное отличие. Гусеничная тележка, танк, трактор опираются на катки, а те в свою очередь на гусеницы. Что заставляет объект двигаться вперед? Принудительное качение катка по поверхности. Здесь неважно, по какой поверхности. Эта поверхность может убираться, может не убираться - все равно. В каждый момент времени при неподвижной гусенице объект относительно неё и среды движется вперед, и, наоборот, нижняя половина гусеницы относительно объекта движется назад. Относительно среды гусеница неподвижна.
В гусеничной лодке почти то же самое: объект относительно воды движется вперед, гусеница относительно объекта движется назад, и она же (её часть) относительно среды движется назад. В гусеничных машинах гусеница относительно среды неподвижна. В этом отличие. Жидкая среда допускает движение двух связанных между собой и со средой элементов с разными направлениями и скоростями. Где это видано? Нет такого ни в танках, ни в самолетах, ни в кораблях, а только частично так движется в определенной фазе винт вертолета и масса газов ракеты.
Чувствуете, идем к принципу реактивного движения. Если силу направить в одну сторону, опираясь на объект, относительно объекта, как, например, простите, действует весло, объект (лодка) станет реактивно двигаться в противоположную сторону, если движение в противоположную сторону возможно. Если оно невозможно, объект останется на месте.
В воздухе, в безвоздушном пространстве, в воде, на разделе сред вода-воздух такая возможность есть. Танк движется, как уже говорилось, по иным принципам, не реактивным, потому что среда не допускает, в общем, такой возможности при данных условиях.
9.
Частные случаи такого вида плавучести и полета теперь широко применяются в технике. Это суда на подводных крыльях и самолеты - с неподвижно установленными относительно корпуса крыльевыми профилями. Несколько более приближены к динамической плавучести вертолеты и динамические парашюты, имеющие крыльевые профили (без обеспечения движения).
Полную динамическую плавучесть создает поступательно движущийся относительно корпуса крыльевой профиль, укрепленный, например, на гусенице, создает он и тягу, а также автоматический выход на поверхность с глиссированием по ней в зависимости от скорости гусеницы! Также в зависимости от действия механизма установки угла атаки. Так-то вот!
10.
Штанга проходит по дну лодки через шаровой шарнир, и может быть установлена под любым углом. В этом случае можно даже лежа приводить лодку в движение, а также управлять ею. Схема такой лодки названа Boat-e.
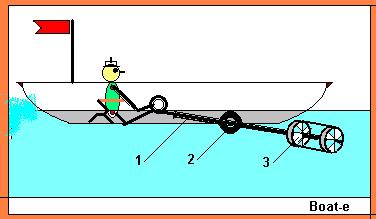 На схеме обозначено: 1 - штанга, 2 - шарнир, 3 - секторный диск.
На схеме обозначено: 1 - штанга, 2 - шарнир, 3 - секторный диск.
Рисунок секторного диска взят из предыдущих выпусков, здесь он назван
Boat-f.
Таким образом, это почти всё о динамической лодке. Однако кое-что ешё
осталось.
Ведущий и автор Cesiy
Архив Рассылки
![]()
http://subscribe.ru/
E-mail: ask@subscribe.ru
Отписаться
Убрать рекламу
| В избранное | ||
