Рассылка закрыта
При закрытии подписчики были переданы в рассылку "Очевидное-Невероятное" на которую и рекомендуем вам подписаться.
Вы можете найти рассылки сходной тематики в Каталоге рассылок.
Технические фантазии в реальном воплощении No 50!
| Информационный Канал Subscribe.Ru |
Код tech.tft
Пространственные шарнирные системы.
Самолетостроение и управление полетом
Выпуск No 50 - Полсотни за 1 год!
Автор и ведущий Cesiy
Cesiy-Effect
относительно конструкции новых самолетов
Трехкоординатное управление крылом.
Введение.
с No 47, как Aircraft-extent. Она приводится ещё раз.
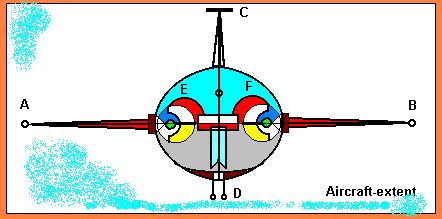
Здесь продолжение
- и схема раскрывается подробнее. Вероятно,
это будет интереснее и полезнее.
Главное - будет ли получен
эффект, или Cesiy-Effect, если рассматривать
эти системы с различных позиций?
Например, Aircraft-extent
выглядела, может быть, как виртуальная схема, не осуществимая в реальности.
Это не так!
Приведенная схема реальна!
Возможны пространственные
шарнирные системы одинакового принципа, но построенные различным образом:
протовофазного или фазного отклонений.
Они определенным образом отличаются, но позволяют схемно и консруктивно
найти оригинальные решения для использования во многих различных областях
техники.
Здесь будет рассматриваться
протовофазная схема отклонений, позволившая
при её применении осуществить особое трехкоординатное управление крылом.
Другая схема - фазная
- требует отдельного описания, но не менее интересна.
1.
Первое применение - это отклонение по поперечному углу, рис. V1
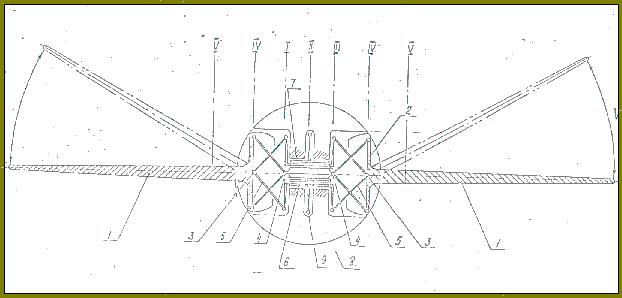
Как видно из рисунка,
крыло 1 показано как в неотклоненном, так и в отклоненном положениях. Позиция
2 это диск крепления правой и левой плоскостей крыла, 3 - его шарниры,
4-шарниры механизма управления. Весь механизм, включая диски крепления
крыла, находится внутри фюзеляжа, однако, возможно и внешнее расположение.
Позиции, обозначенные римскими цифрами-это плоскости поперечных разрезов
(здесь не приводятся).
Диски крепления крыла
и механизм управления по соответствующим базам связаны соединителями 5,
не выходящими за диаметр диска. Объем, занимаемый пространством соединителей,
определяется их длиной, а также расстоянием между плоскостями III и IV.
В связи с любой базой соединителей нагрузки в шарнирах могут быть как угодно
малыми.
Механизм управления занимает,
например, центральное место в фюзеляже и находится между плоскостями I
и III.
Таким образом, плоскости
крыла и их механизм управления представляют собой единый обособленный блок.
Его размещение может производиться в любом месте фюзеляжа. Количество единых
обособленных блоков, размещенных в фюзеляже, может быть любое. Например,
это также ПГО или хвостовое оперение.Такие единые обособленные блоки могут
применяться по другим назначениям, а также в других областях техники.
Их
особенность - это возможность с помощью одного механизма управлять,
например, крылом так, что его правая и левая плоскости будут двигаться
по поперечному углу синхронно и противофазно.
Та же возможность существует
и в том случае, когда поперечный угол отрицательный.
Функции отклонения крыла
по поперечному углу в полете известны и могут быть расширены, например,
при совместном действии при отклонении также по углу стреловидности.
Позиции 6 и 7 показывают
элементы механизма управления. Позиции 8 и 9 - точки действия электрогидравлических
или электромеханических приводов управления.
Для управления крылом
по трем угловым координатам используются три привода, действующие совместно
или отдельно.
Угол поворота вала
управления относительно позиций 8 и 9 может быть включен как составляющая
или параметр в алгоритм автоматической системы управления. Зависимость
угла поворота плоскости крыла от угла поворота вала управления выражается
оригинальным соотношением. Это передаточное соотношение, рассмотренное
аналитически и графически, представляется соответственно нелинейным и является
тем положительным фактором, который обеспечивает плавность и устойчивость
управления. Формула представлена на рис. C1
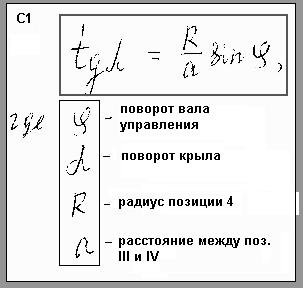
Как видно из формулы, передача движения к крылу может производиться как с замедлением, так и с убыстрением движения в зависимости от её текущих и параметрических (R/a) составляющих. Особенно наглядно и интересно формульная зависимость выражается графически при различных величинах параметра R/a.
2.
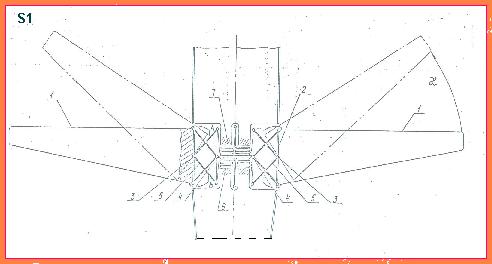
На этом рисунке (теперь
вид сверху) крыло вновь показано как в неотклоненном, так и в отклоненном
положениях. Позиции и обозначения полностью совпадают с рис. V1.
Здесь можно вновь определить,
что отклонения плоскостей крыла с помощью механизма управления происходят
синхронно
и противофазно.
Можно также добавить, что показанные отклонения произведены в конструкции,
отличной от принятых для этих же целей, в которых закрепления крыла и его
отклонения по углу стреловидности осуществляются с помощью одностепенных
шарниров малой базы и значительного веса.
В
рассматриваемом случае вид закрепления позволяет осуществить любую другую
базу, никак не отличается от принципов подвеса и управления крылом, и формулой
по поперечному углу, имеет единый механизм подвеса и управления с теми
же свойствами, которые были отмечены выше.
Здесь
же можно вновь добавить, что одновременно с прямой возможно исполнение
обратной стреловидности.
3.
Вращение механизма управления вокруг продольной оси блока подвеса и управления (при действии приводов управления на точки 8 и 9 относительно корпуса фюзеляжа) приводит к повороту крыла по углу атаки (!). Поворот по углу атаки, как можно увидеть из вышеприведенных рисунков и их описания, происходит так, что одновременно приходят в движение правая и левая плоскости крыла, причем это движение как синхронно, так и в одной и той же фазе.
Замечательное свойство противофазного механизма подвеса и управления крыла в том, что он дает возможность именно таких поворотов, которые требуются для любого ЛА: движение по поперечному углу в противофазе, движение по углу стреловидности - в противофазе, а движение по углу атаки - в фазе!
Кроме возможностей при осуществлении движений по углам поперечному и стреловидности, изменение положения крыла по углу атаки за счет его поворота вокруг продольной оси механизма, открывает ещё и многие другие положительные качества, используемые в полете, в частности, при взлете и посадке.
Так, при взлете и разбеге по ВПП плоскость крыла при достижении определенного режима поворачивается по углу атаки, угол атаки увеличивается - при этом происходит взлет без изменения угла наклона продольной оси фюзеляжа и при меньшей длине разбега.
При посадке и пробеге по ВПП плоскость крыла при достижении определенного режима поворачивается по углу атаки, угол атаки увеличивается - происходит эффективное воздушное торможение без применения других средств, длина пробега по ВПП эффективно сокращается.
4.
Например, можно представить заход на посадку при отклонениях крыла по углу стреловидности, причем одновременно с отрицательным поперечным углом и соответствующим углом атаки (при их определенных оптимальных величинах). Указанная геометрия позволит снизить скорости режимов посадки при сохранении устойчивости. В некоторых случаях это может быть самым необходимым.
В крейсерском режиме возможно достижение максимальной скорости и экономичности полета при соответствующей стреловидности одновременно с взаимодействием по поперечному углу и углу атаки.
Поскольку возможно отдельное исполнение механизма подвеса и управления крылом (при соответсвующих креплениях его относительно фюзеляжа), диапазон видов и типов ЛА в этом случае значительно расширяется.
5.
Например, может быть эффективным его применение в наземных видах транспорта, в частности, в автомобилестроении. Как можно понять, те же противофазно-фазные принципы требуются для управляемых колес автомобилей. Действительно, если представить, что диски крепления это суть колеса автомобиля (без привычной оси вращения), механизм блока подвеса и управления обеспечивает все необходимые условия движения и управления. Качение по поверхности - это фазное угловое вращение, угол развала - это противофазная установка (аналог поперечного угла), угол схождения - это противофазная установка колес (аналог угла стреловидности). В этом случае соединители 5 могут быть выполнены из тросовых элементов, обеспечивающих безосевой подвес и одновременную амортизацию. Становится возможным управление и изменение всех трех величин угловых положений колес непосредственно из кабины.
Единый блок подвеса и управления может быть применен в качестве манипулятора. Можно увидеть, что правая и левая части блока, например, диски крепления взаимосвязаны между собой по трем угловым координатам. Таким образом, если на правый диск крепления оказывается какое-то угловое действие, левый диск крепления его повторяет (с точностью до фазы и противофазы), то есть обеспечиваются три степени свободы. В этом случае не составляет технических трудностей ввести дополнительно ещё три степени свободы поступательных перемещений в пространстве.
Единый блок может служить в качестве стенда угловых перемещений, если один из дисков крепления (нижний) установить неподвижно, а на другом (верхнем) упрепить исследуемый аппарат или прибор. При этом верхний диск (или платформа) получит "двойное" угловое движение при действии механизма управления в соответствии с приведенной ранее формулой.
Получает интерес подвес объекта с помощью единого блока, например, к корпусу ЛА. В этом случае угловые эволюции корпуса ЛА не будут передаваться на объект, произойдет их взаимная развязка (в фазном варианте).
Ещё более прогрессивным может оказаться случай, когда блок управления расположен вертикально (относительно рис.V1). Нужно повернуть рисунок на 90 градусов - это легко делается соответствующими методами на ПК. Повернули?
Теперь представьте, что плоскость II Вы закрепили на палубе корабля (или на ином подвижном объекте). Тогда одна плоскость крыла 1 окажется под палубой, в трюме, а другая - над палубой. Вместо плоскостей крыла могут быть какие-нибудь другие объекты или платформы, нижние и верхние.
Если на нижней платформе установить соответствующим образом несколько "тяжелых" гироскопов (или "космических" гиродинов) и привести их в действие, когда "нижняя" находится в горизонтальной плоскости, эта "нижняя" застабилизируется в пространстве относительно угловых координат. Верхняя платформа, будучи с ней связанной по трем координатам, "отработает" стабилизацию "нижней", то есть останется неподвижной в пространстве при всех угловых эволюциях палубы корабля, если ввести в блок управления не противофазовую, а фазовую схему угловых взаимодействий. Это совершенно отдельная тема и отрасль техники, требующая иного, тоже интересного, представления.
Для продолжения требуется описание единого блока, в котором проявлена "фазность" угловых отклонений. Его схема не сложнее, рассмотренной для ЛА, только изменяются плоскости соединителей 5.
Sapienti Sat!
Ведущий и автор Cesiy Архив Рассылки
| http://subscribe.ru/
E-mail: ask@subscribe.ru |
Отписаться
Убрать рекламу |
| В избранное | ||
