Рассылка закрыта
При закрытии подписчики были переданы в рассылку "Очевидное-Невероятное" на которую и рекомендуем вам подписаться.
Вы можете найти рассылки сходной тематики в Каталоге рассылок.
| ← Апрель 2002 → | ||||||
|
1
|
2
|
3
|
4
|
6
|
7
|
|
|---|---|---|---|---|---|---|
|
8
|
9
|
10
|
11
|
12
|
13
|
14
|
|
15
|
16
|
17
|
18
|
19
|
20
|
21
|
|
22
|
24
|
25
|
26
|
27
|
28
|
|
|
29
|
30
|
|||||
Статистика
-2 за неделю
Технические фантазии в реальном воплощении # 46
Код tech.tft
Плавательные средства водных и воздушных пространств.
Выпуск No 46.
Автор и ведущий Cesiy
Самоходная динамическая лодка без весел.
(некоторое дополнение выпуска No 45 с приложением)
Автономные устройства движения
с участием человека и приводных механизмов.
Динамика и действие различных профилей и устройств
в жидкой и воздушной средах.
1. Введение.
2.
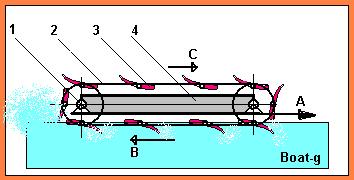
По рисунку видно,
что гусеница 2 укреплена на ступице с осью 1, помещенной в корпус 4. Конструкция
корпуса - это, как говорится, "на вкус и цвет товарища нет". На гусенице
"сидят" профили 3. Эти профили могут быть любого вида (чем лучше - тем
лучше) и выбираться в зависимости от назначения плавательного средства.
Этих назначений множество, как упоминалось во введении.
Конструкция по рисунку тяготеет
к быстроходным устройствам. Показано, что профили на гусенице - это крыльевые,
а их действие выводит нижнюю часть гусеницы к поверхности воды и глиссированию
по ней.
Ранее уже говорилось, что
нижняя часть гусеницы движется относительно корпуса и среды назад (по стрелке
В), создавая реактивную силу на корпус. Скорость гусеницы и её крыльев
достаточно высокая, такая, чтобы создать скорость судна, например, 100
узлов!
В определенный момент КПД
начинает падать (бездушный предмет не знает, что от него требуется) - нужно
"научить" понимать избегать срывов потока, и при их появлении изменять
угол атаки крыла (или скорость движения). Как автоматизировать "понимание"
здесь не рассматривается. Оно было представлено ранее, в природном варианте
регулирования угла атаки при спуске семечка, в выпуске "Сезон парашютирования".
Верхняя часть гусеницы движется
вперед (по стрелке С). Действие крыла в воздухе иной эффективости, чем
в воде, однако, поток создается.
Судно движется вперед со
скоростью, обозначенной вектором А. Скорость верхней части гусеницы удваивается
(относительно среды).
Судно в результате
действия крыльевых (или иных) профилей получает динамическую
плавучесть по поверхности, и освобождается тем самым от действия
сопротивления водной среды. В этом случае степень экономичности, КПД и
многих других факторов, например, управляемости, возрастает.
Степень протяженности
крыла (длина крыла) может быть как угодно увеличена. Судно (в этом случае)
получает только одну гусеницу, работающую под днищем.
Оснащение судна гусеницей
может быть произведено без изменения конструкции (или с изменением), в
частности, днища, и Boat-g укрепляется под ним как обособленный узел.
И т.д. Много интересного!
Много интересного
(и, вероятно, полезного) можно предположить (и описать это), рассматривая
и анализируя дальше рисунок Boat-g и другие под латинскими
буквами, как это принято в морском словаре. Займет это много страниц, поэтому
их схемы и описания в настоящем выпуске ограничены. Не трудно конструировать
и мысленно и реально самостоятельно.
3.
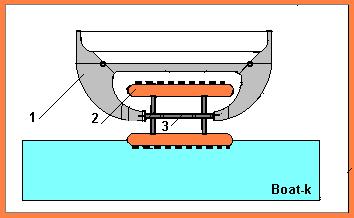
Он необычен только
тем, что вместо неподвижных крыльев, как это конструктивно принято в судах
на подводных крыльях, данный частный вид имеет установленную относительно
корпуса 1 подвижную гусеницу 2, укрепленную на вращающихся валах 3. На
гусенице (а не на корпусе или на днище) могут находиться различные профили,
с помощью которых обеспечивается динамическая плавучесть и движение. Длина
горизонтальный ветвей гусеницы не ограничена. Конструкции гусеницы самые
разнообразные.
Например, она может выполняться
из прорезиненного пористого материала, как это показано на Boat-k или так,
как это изображено в Boat-g. В первом случае (Boat-k) на гусенице имеются
вихревые продольные накладки, во втором (Boat-g) - крыльевые профили. Могут
быть другие. Их "испытательный" макет под разные виды профилей в уменьшенном
масштабе легко изготавливается, и его испытания производятся в небольшом
водном бассейне с соответствующим оснащением, включающем электронные цифровые
весы-датчики по трем координатам. Очень перспективное и интересное дело
с разных точек зрения.
Нижняя часть гусеницы
может работать как под водой (на малом ходу или при причаливании), так
и на поверхности воды (в крейсерском режиме или в режиме максимальной скорости).
Соответственно режимам движения КПД и эффективность работы разные, но этот
принцип является функцией многих переменных.
4.
Вероятно, нужен каталог механизмов водных движителей, аналогично существующим для сухопутной и воздушной сред. Он представляется наиболее могущественным, так как водная среда наиболее откликается на вводимое в неё действие.
5.
Поэтому далее следует Cesiy-PS-Effect, разрешающий этот вопрос.
6.
Cesiy-PS-Effect.
(приложение)
Этот рисунок - особый знак для специалистов и интересующихся данным вопросом с целью соответствующей разработки и полезного промышленного использования.
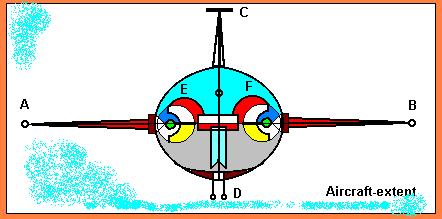
Он что-то напоминает. Можно подумать,
что это рыба в воде или её аналог (вид
спереди), или самолет в воздухе (поперечный
разрез). Ошибки нет - это и то, и другое, выполненное реально. Подробности
схемы не приводятся. Они должны быть оформлены соответствующим документом.
Однако позже описание Aircraft-extent
будет продолжено. Название рисунка предполагает его особую привилегию для
ЛА.
Здесь показано: E
и F - синхронный механизм трехстепенного подвеса и управления плоскостями
A и B, соответственно
A и B - правая и левая плоскости, С - стабилизатор,
D
- шасси. Все узлы (A, B, C, D, E, F) установлены относительно фюзеляжа
(или корпуса другого объекта). Под объектом понимается самолет, прибор
или узел самолета, другое воздушное судно, спускаемый аппарат, ракета,
подводная лодка, судно на подводных крыльях, иное судно для водного или
подводного пространства, катер, глиссер, их узлы и гусеницы, корабль трех
сред (воздух, вода, суша), другое.
Плоскости А и В (в
самолетных терминах) отклоняются в противофазе по углу стреловидности,
в противофазе по поперечному углу, в фазе - по углу атаки. Управление указанными
отклонениями производится вместе или отдельно тремя приводами, установленными
неподвидно относительно корпуса, и действующими на три обособленных вала.
Установка плоскостей
- консольная, однако база установки может быть любой, что создает уменьшение
усилий, действующих на шарниры консолей.
Плоскости А и В -
любой массы и размеров, от мини до макси. Отсюда, их динамика соотвественно
взаимозависима от величин масс и действующих сил. Движение и повороты плоскостей
могут быть приближены как к статическим видам, так и к динамическим соотвествующей
степени, причем, они могут происходить как по независимым углам, так и
в совместном угловом пространственном движении. Особый интерес представляет
пространственная динамика легких масс - при этом возможно возникновение
как функций управления, так и возникновение функций, действующих на движение,
а также их совместное действие.
В случае использования
только функций движения (с частичным сохранением управления) можно отказаться
от многих ранее примененных движителей как в водной, так и в воздушной
средах: винты, гусеницы, струйные двигатели. Можно приблизиться,
например, к действию и принципу устройства боковых плавников рыб.
Конструктивно заманчива
их установка на быстроходных катерах, выходящих с их помощью на режим движения
по поверхности. Ещё более значимо применение представленной схемы в качестве
ПГО - переднего горизонтального оперения самолетов (существенный подарок
специалистам данного профиля).
В качестве практических
и теоретических доводов (и успехов) можно, упреждая возникновение вопросов,
связанных с боязнью конструктивных сложностей, сообщить по этому поводу,
что нет (или почти нет) других пространственных схем, выполняемых так просто.
Отсюда происходит быстрое и легкое макетирование и возможность той же практики
при испытаниях в условиях разных задач.
Ведущий и автор Cesiy
Архив Рассылки
![]()
http://subscribe.ru/
E-mail: ask@subscribe.ru
Отписаться
Убрать рекламу
| В избранное | ||
