
Многие, кто работал с манипуляторами роботов, знакомы со сбоями при выполнении манипулятором процесса схватывания предметов. Оператор просит, чтобы робот взял что-то. Но по какой-то причине, он отказывается делать это. Часто причина состоит в том, что робот не может понять, как правильно поместить свой захват манипулятора относительно предмета. Потому что предмет находится в неудобном месте. И попытка захвата предмета привела бы, например, к столкновению захвата со стенкой ниши, в которой лежит предмет.
Пять лет назад исследователи из университета Вашингтона в Сиэтле сделали доклад о том, как оборудование мобильных манипуляторов (таких, как у робота PR2) простыми инструментами может помочь манипуляторам быть более эффективными при захвате (и, следовательно, использовании) предметов. Раньше была похожая работа, в которой робот использует свой захват, чтобы подталкивать предметы в ограниченной или загроможденной окружающей среде, чтобы было легче их схватить. Но захват – не лучший инструмент для такой работы. А недавно был сделан другой доклад по новому виду инструмента, специально предназначенного для того, чтобы роботы могли переориентировать в пространстве (сдвинуть, повернуть) «незахватываемые» предметы и потом захватить их. «Подталкивающий инструмент» – это «прямоугольная лопатка с рифлёной поверхностью, имеющей высокий коэффициент трения». По мнению разработчиков, лопатка - «идеальный инструмент для подталкивания предметов в ограниченном пространстве». А возможность использовать конец лопатки, чтобы подтягивать на себя позволяет выполнять значительно больше действий над предметами.
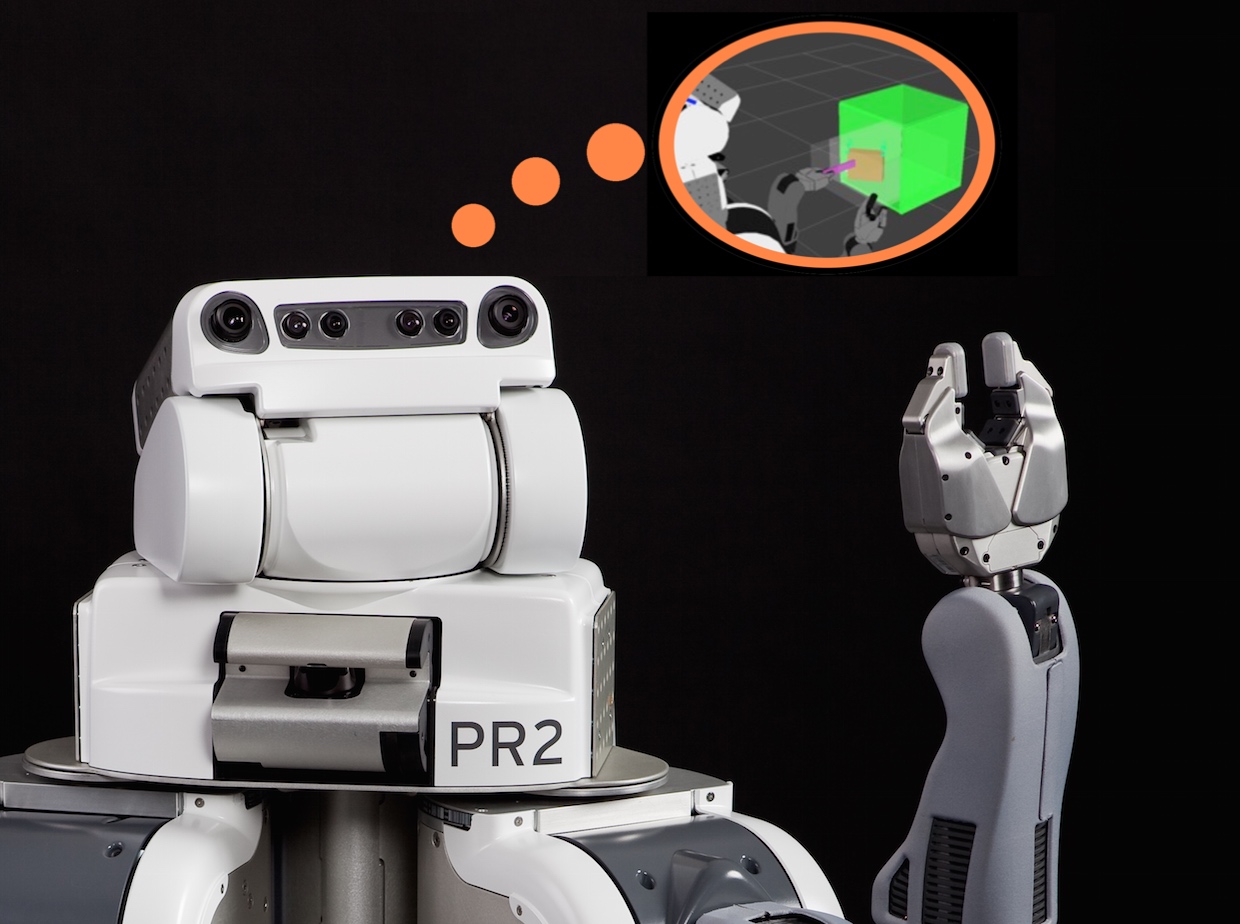
Лопатка смонтирована на плече PR2, и робот, когда это необходимо, может выполнять ей нужные в данной ситуации движения. Встроенное программное обеспечение робота PR2 достаточно «умно», чтобы «сказать», сможет ли захват робота успешно схватить что-то. Таким образом, программа должен будет заставить робота сказать: «Хорошо, я не могу схватить это. Но если я воспользуюсь лопаткой, объект станет захватываемым». Вместо того, чтобы пытаться программировать алгоритм вручную, исследователи заставили робота самого создавать собственную прогнозирующую модель того, как действия лопатки будут влиять на «захватываемость» предметов (исходя из полученного опыта). Читать далее...
|
Это интересно
0
|
|||


Последние откомментированные темы:
-
Станет ли изобретение ИИ закатом Человечества
(1)
andr
,
08.04.2014
-
Робот-юморист с искусственным интеллектом
(10)
andr
,
02.04.2014
-
Таки Первое апреля сегодня...
(2)
klassik162
,
02.04.2014
-
Чем больше ног – тем лучше робот?
(3)
andr
,
02.04.2014
-
Типа, робо-юмор...
(1)
andr
,
31.03.2014
20241228184426